Помните, что данный проект - это самодельное устройство. Я делал его для себя. Его надежность, ресурс и безопасность достоверно не подтверждены. Все, что вы делаете - вы делаете на свой страх и риск. Я не несу никакой ответственности ни за какие последствия правильного и неправильного использования этого устройства. Не надо приходить ко мне, когда 100 литров браги разольются по полу, если вы оставили оборудование без присмотра. Проверяйте и тестируйте все очень ответственно!
С чего все началось
Приобрел я себе НБК, а пока мне ее варили, я решил, что надо бы на коленке по-быстрому сварганить насос, потому-что что-то готовое из Китая не успело бы приехать, а на родине цены так себе. Полистал Thingiverse, там много подобных проектов, но все они либо под недоступные шланги, либо с малой производительностью, т.к. качать надо было 20-30 литров. В итоге появился этот проект, полностью открытый, все 3д модели и прошивка для драйвера опубликованы на GitHub и Thingiverse.
Производительность
Первые версии использовали китайские тонкостенные шланги. Последняя версия головки с пружинным поджимом нормально работает с нашими шлангами. На данный момент я использую шланг 9*6мм, со стенкой 1,5мм. Используя шаговый драйвер TB6560, мне удалось разогнать двигатель 17HS4401S до 1000 RMP. Насос набирал 3х литровую банку за 1,5 минуты (~120-130 л/час). С драйвером A4988 максимальная скорость в районе 450-500 RPM . Для себя я ограничил обороты на 450 RPM, а ток двигателя снизил до 1А. В итоге качает 65л/час и практически не греется ни драйвер, ни двигатель.
Тестирование:
"Ресурсные испытания" проводил 3ое суток: первые на скорости - 50л/ч, вторые - 60л/ч, третьи - 65л/ч. Ничего не развалилось и не сгорело. Достоверно шланг 9/6мм без повреждения отработал 60 часов, за которые перекачал около 3.5 тонн воды. Это минимальная оценка, т.к. когда точно течь ночью появилась, сказать не могу.
Update 1: За это время накопилось много отзывов, мне достоверно известно, что некоторые насосы отходили по 30-40 тонн. Ресурс шланга 1.5-2.5м3, но можно заправить сразу длинный шланг из бочки в колонку и периодически (раз в 500-1000л) сдвигать его в сторону. Так отрезка шланга 1м длиной может на 10-15 тонн хватить.
Update 2:
Update 3: Кипяток нельзя, разорванные колонны нельзя. От термических и механических нагрузок пластик лопается через несколько суток работы.
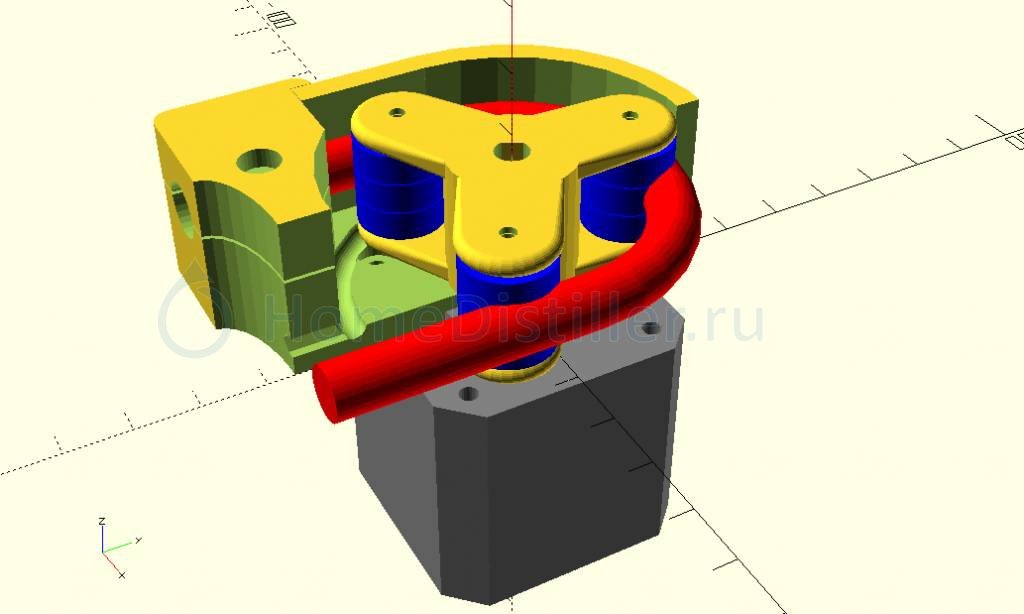
3Д печать (обновлено 2018-12-23)
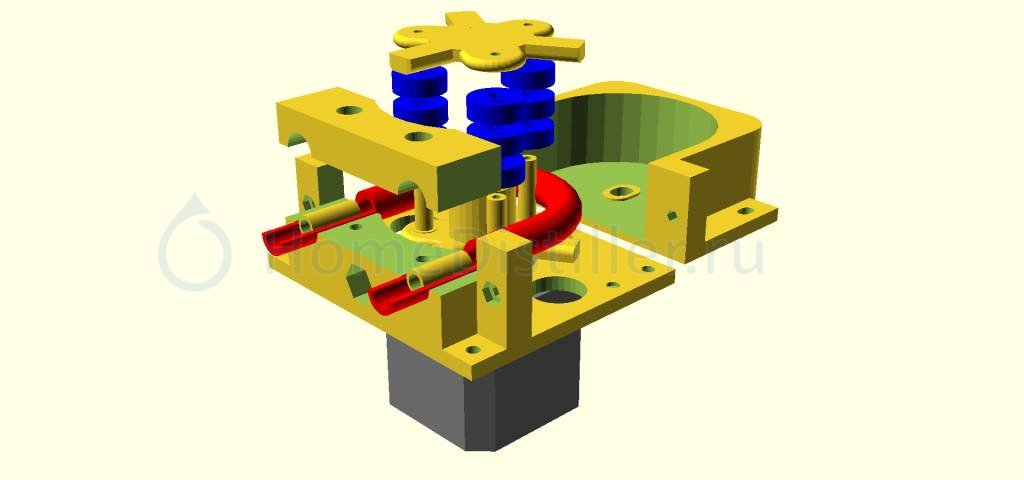
Напечатать надо 7 деталей: статор, упор для шланга, крышка статора, ротор, крышка ротора, 2 фиксатора для шланга, (опционально) 2 фитинга для шланга. Для печати лучше использовать термостойкий пластик, PLA ведет при нагреве мотора. Головку v3 я печатал ABS пластиком. Заливка ротора 100%, статора 30-50%. По результатам обсуждения в теме добавил версию ротора с направляющими для шланга. Но они царапают шланг, поэтому надо их зашкурить и загладить растворителем (проще всего с АБС, он легко шкурится и растворяется ацетоном).Корпус рассчитан на печать соплом 0,4мм с extruction width 0.43-0.46мм, для этого боковые стенки сделаны немного шире, чем наклонные.
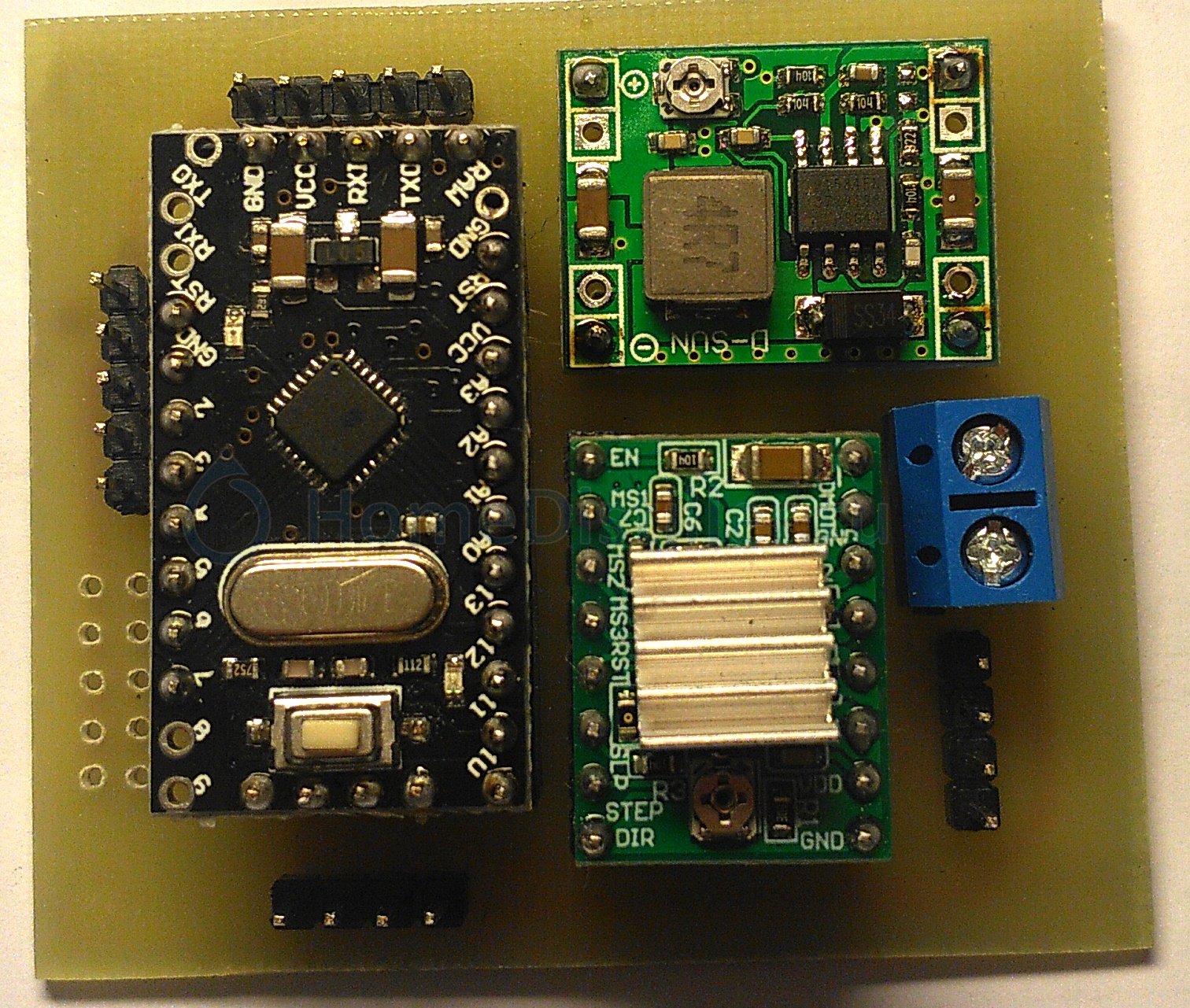
Печатные платы (добавлено 2018-12-23)
Развел печатки в DipTrace под Arduino pro mini & A4988. Исходники и pdf-ка под ЛУТ прицеплены ниже. Выглядит так: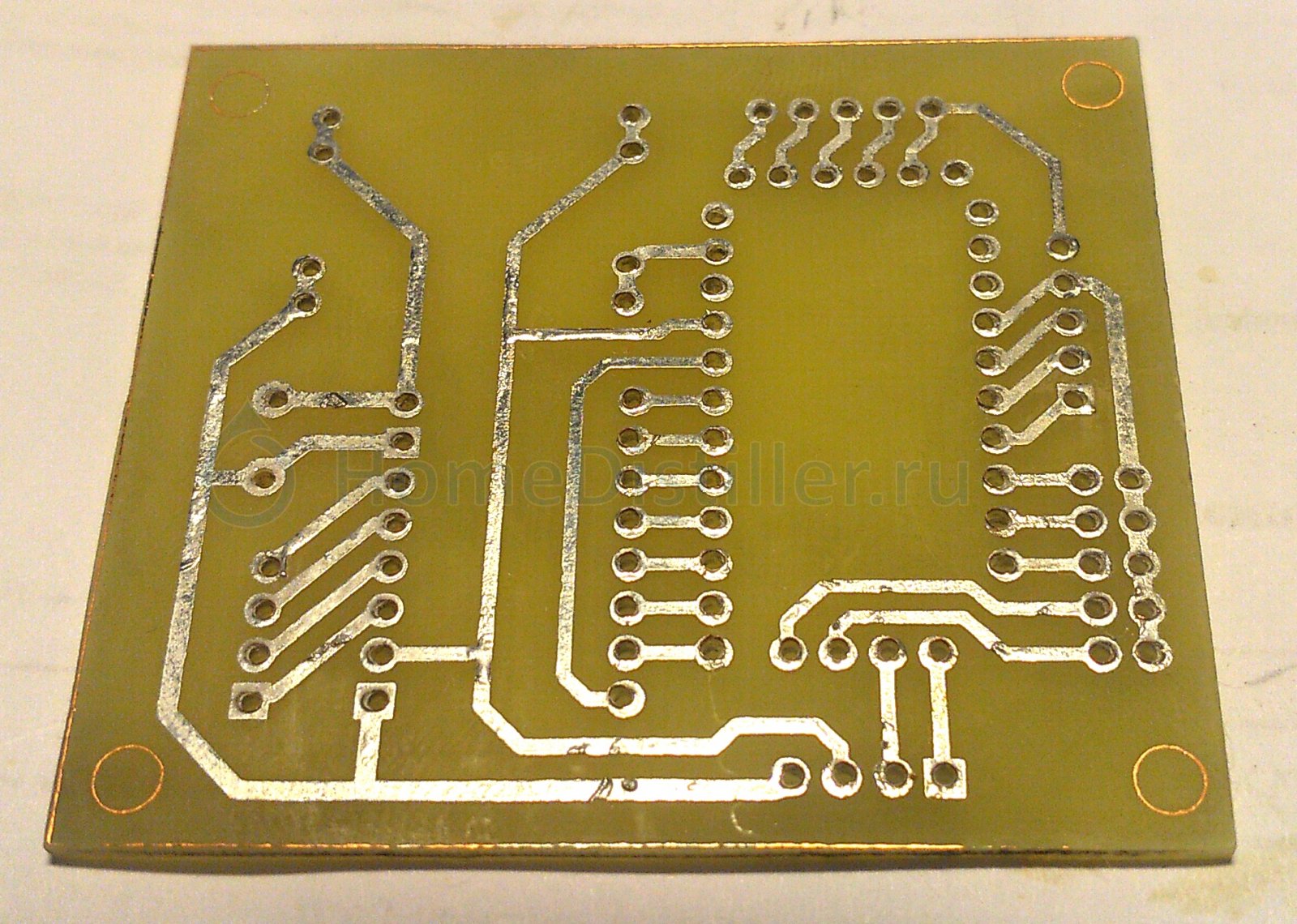

Комплектующие (обновлено 23.02.2020)
Ссылки на комплектующие на 23.02.2020 были рабочие. Если ссылки не работают, ищите похожие с хорошими отзывами.| Наименование | Кол-во | Ссылка |
| Nema17 | 1 | https://aliexpress.ru/item/32376023464.html |
| Pro Mini | 1 | https://aliexpress.ru/item/33051711057.html |
| A4899 | 1 | https://aliexpress.ru/item/4000327048447.html |
| dc-dc | 1 | https://aliexpress.ru/item/32261885063.html |
| Ножки | 4 | https://aliexpress.ru/item/32844587782.html |
| Пружины | 2 | https://aliexpress.ru/item/2053018943.html |
| Подшипники | 9 | https://aliexpress.ru/item/32801386435.html |
| LCD | 1 | https://aliexpress.ru/item/32836972320.html |
| Encoder | 1 | https://aliexpress.ru/item/32474584136.html |
| GX-12 4pin | 1 | https://aliexpress.ru/item/32866844138.html |
| GX-12 2pin | 1 | https://aliexpress.ru/item/32866844138.html |
| Jack питания | 1 | https://aliexpress.ru/item/32883658107.html |
| Датчик капель | 1 | https://aliexpress.ru/item/1835773801.html |
| Блок питания | 1 | https://aliexpress.ru/item/1000001113368.html |

Функции, реализованные в прошивке
На данный момент насос умеет v2.3+:1. Регулировать RPM
2. Регулировать поток в л/час или мл/мин
3. Качать заданное количество жидкости
4. Калибровка
5. Плавный старт/стоп
6. С датчиком влажности обнаруживать повреждение шланга
7. Поддерживает внешнее управление ШИМ или аналоговым сигналом
Режимы переключаются кликом, double click это быстрый старт/стоп. Удержание - вход в режим калибровки
История версий
v1 Первая версия головки, без пружин и корпусаv2 Первая версия головки в пружинным поджимом шланга
v3 Рабочий вариант головки под шланг 9*6мм + 1ая версия корпуса
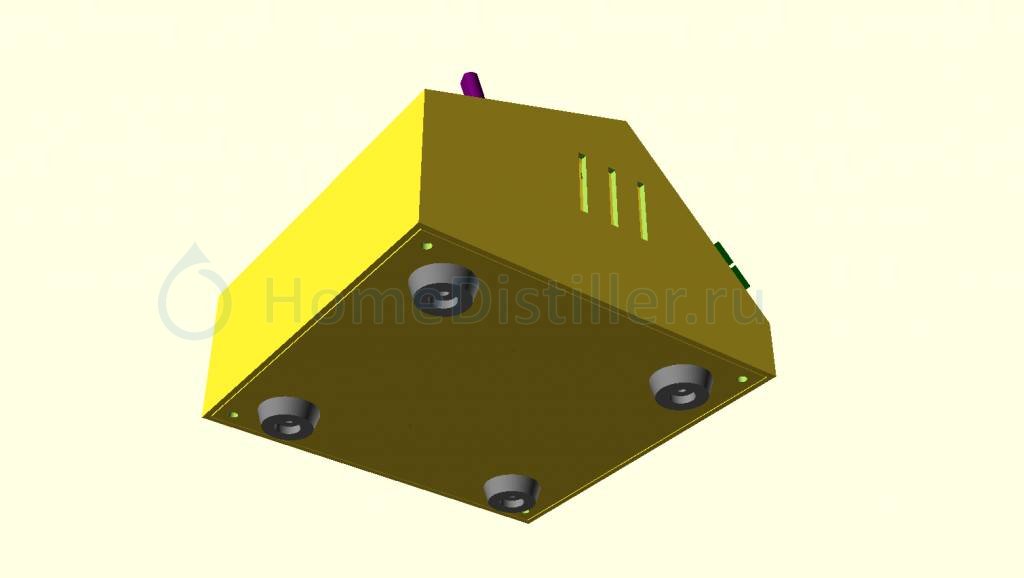
v4 Основание у головки сделал потолще. У корпуса сделал защелки для нижней панельки и резиновые ножки
Небольшой FAQ
NB! Последние версии файлов опубликованы на GitHub!
NB! Удобная плата "все в одном" под последние версии скетча с внешним управлением. Лучше делать её!
Видео обзор
Варианты изготовления и отзывы
Альтернативные разработки (здесь буду собирать ссылки на разработки наших коллег по форуму и другие проверенные модели)
- Вариант насоса от golem73