буду размещать информацию постепенно
Что хотел получить
Перистальтический насос с широким диапазоном изменения скоростей, высокой мощностью, высокой стабильностью
Ну и конечно универсальный и удобный в применении
Почему на шаговом двигателе:
Использование обычного DC двигателя хоть и проще конструктивно, но имеет следующие явные минусы:
1. Мощность сильно падает при уменьшении оборотов
2. Весьма приблизительно можно регулировать скорость
Шаговый двигатель этих недостатков лишен, мощность у него меньше на высоких оборотах
Еще одна причина как раз кроется в малых оборотах, т.к. очень хочется вместо клапана отбора использовать ту же перистальтику на низких скоростях
Вариант подключения к скетчу 0.98
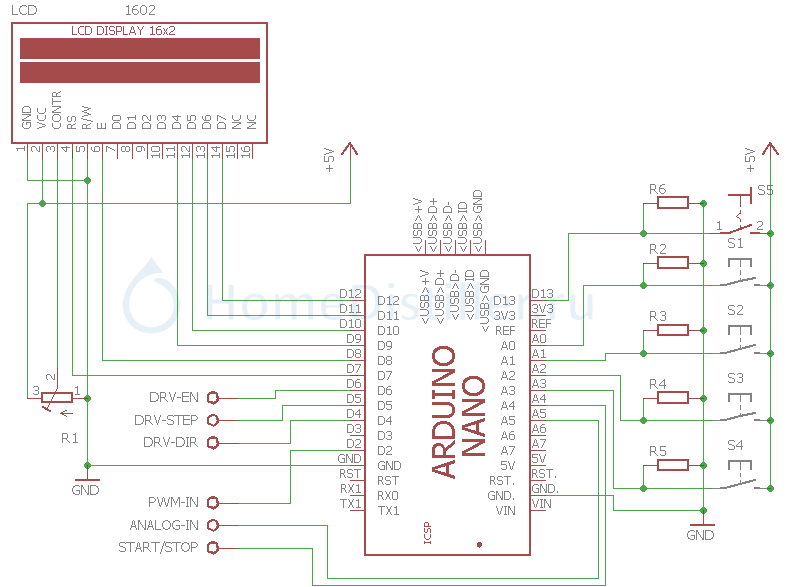
В любом случае лучше проверить соответствие пинов в скетче, в разных версиях были отличия
Скетч обновил под IDE 1.6.5
Сделал единый скетч под обе клавиатуры, настраивается в самом скетче
Во вложении еще один тестовый скетч для простого тестирования вращения двигателя. Разгон до 100 RPM, вращение
upd
Выложил тестовый скетч с внешним управлением. Немного вроде протестирован. Версия IDE 1.6.7
Подтяжки резисторами 10КОм
пин 13 - тумблер включения внешнего управления, подключайте с подтяжкой к 0
пин А5 - на него 0..5В
добавил
пин А4 - вход дополнительного сигнала работа/стоп, необходима подтяжка к 0
upd
Выложил тестовый скетч с вариантом реализации переключения на внешнее управление обычной кнопкой
для этого нужно изменить параметр
#define KEY_C_MODE 1
upd
Выложил скетч с внешним ШИМ управлением, период 1 сек, IDE 1.8.3
Начало измерения - переход на низкий уровень, окончание - на высокий
Изменена распиновка, схема выше
upd
ШИМ управление оказалось никому не интересно, скетч удалил, схему поправлю на вариант с аналоговым управлением