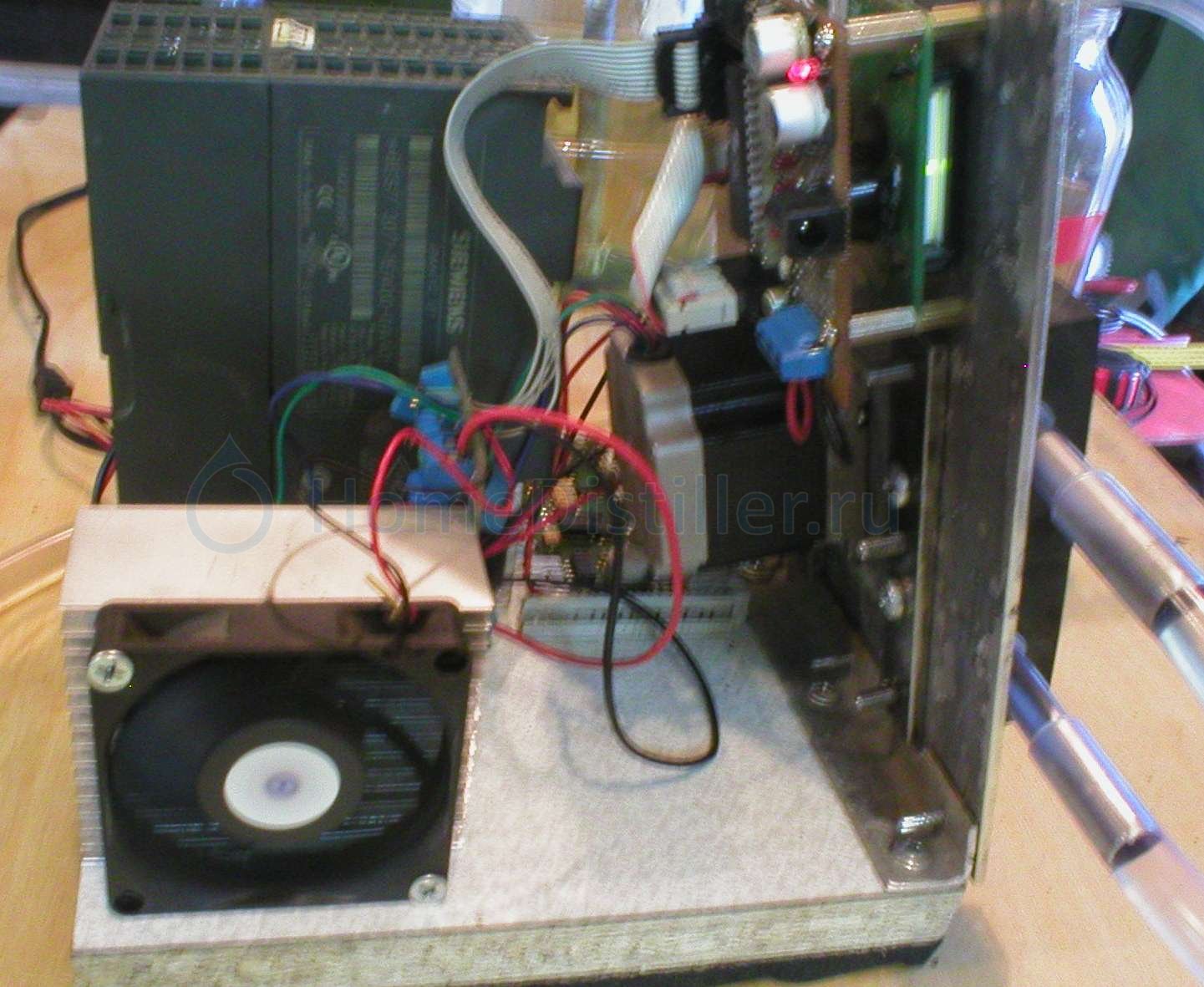
шаговик - PL57H56-2.6-4
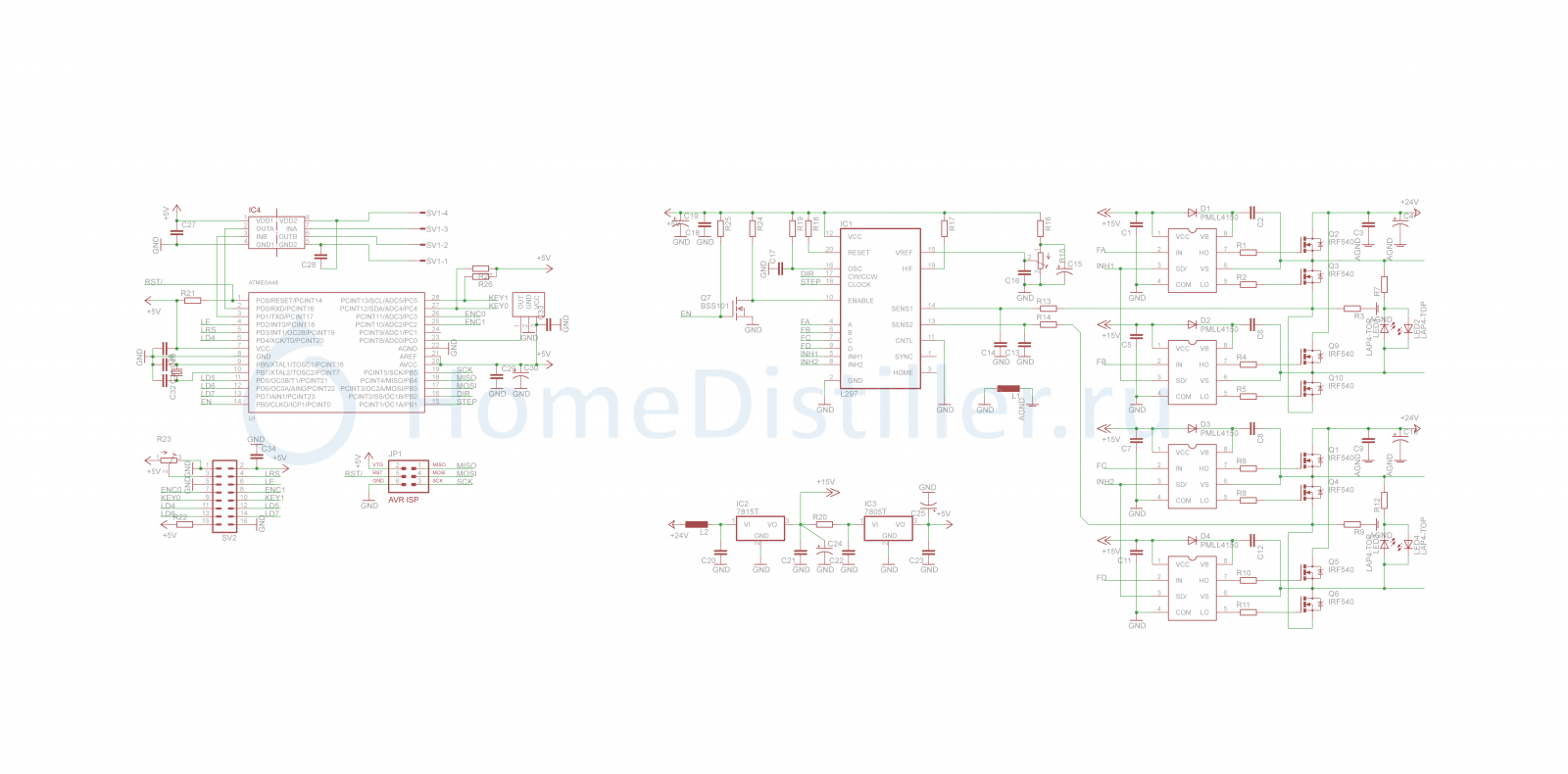
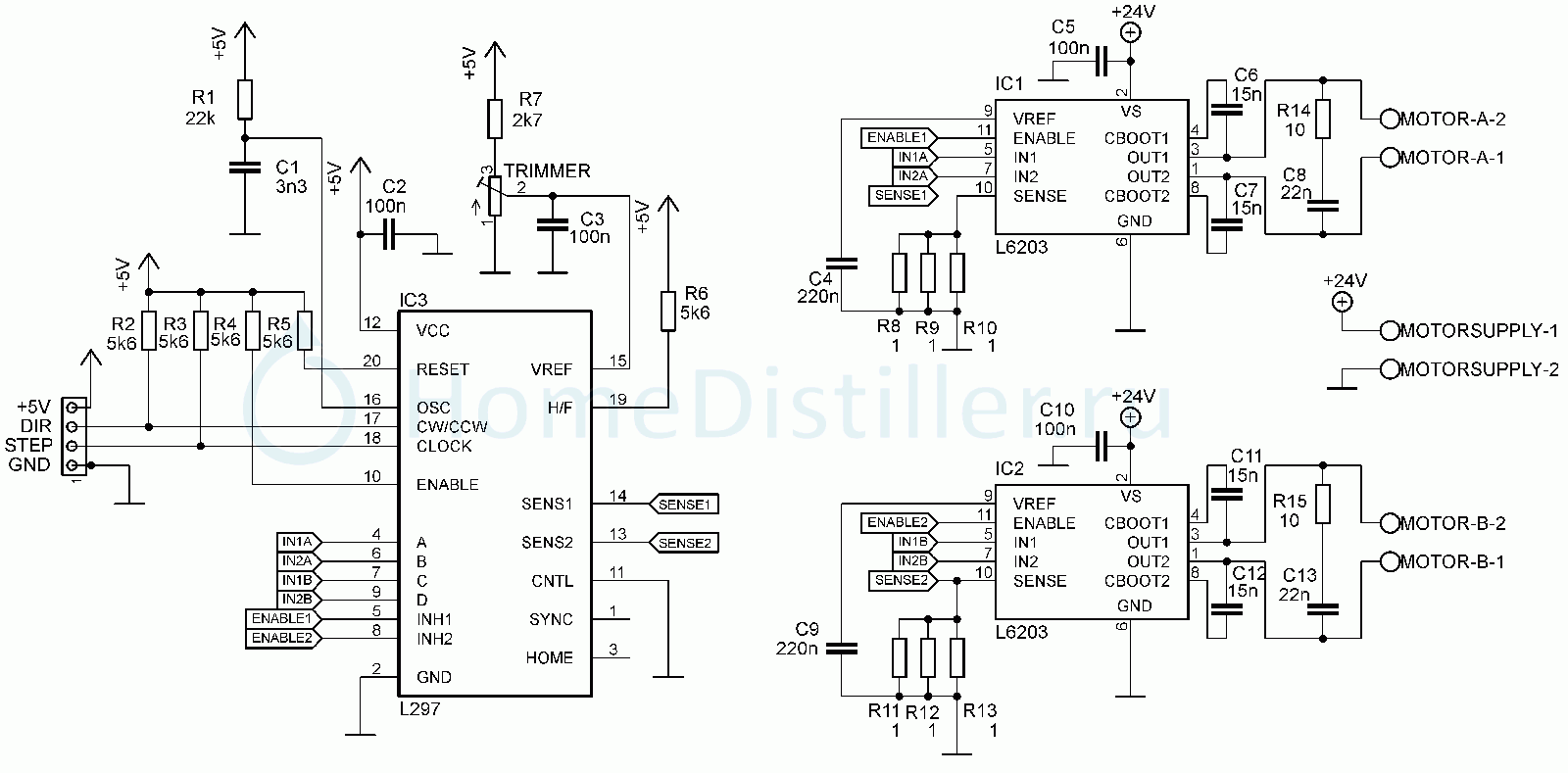
драйвер - L297 + L6203 *2
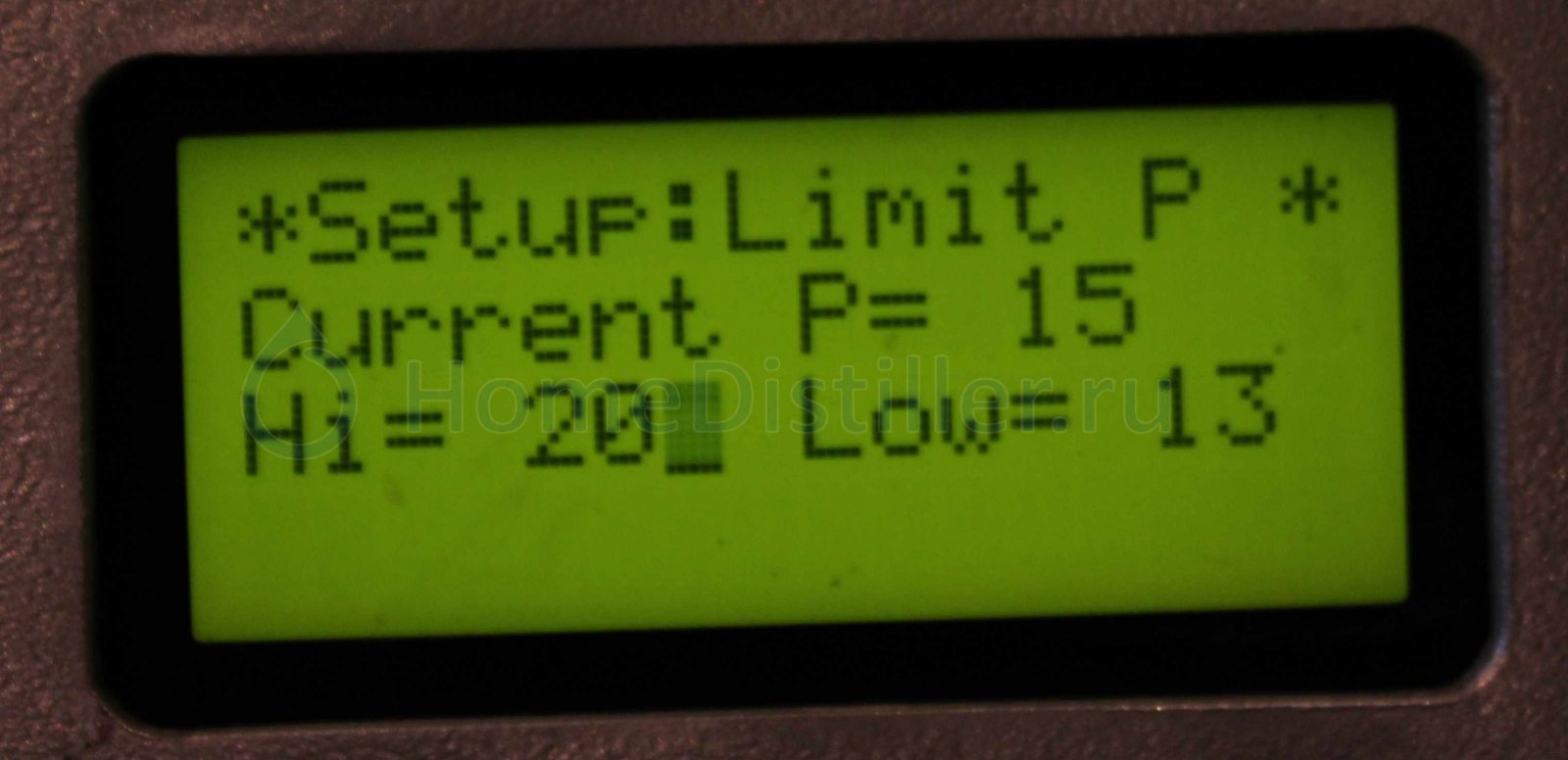
контроллер на базе atmega48 + lcd HD44780 16x4 .контроллер крутит двигатель от 10 до 250 об/мин
прошивка - самопал ;o) . возможности управления девайсом в ролике , замечу что все парамерты хранятся в энергонезависимой памяти, так что каждый раз обучать помпу нет необходимости. счётчик объёма перекачанной жидкости до 1000л
управление - энкодер + три кнопки
производительность - (измерялась только на воде) с двумя роликами - до 100л/ч , с тремя - до 80л/ч , с четырьмя - до 75л/ч , с шестью-жуть диаметр головки маловат
бюджет:
шаговик с пересылкой - 1500
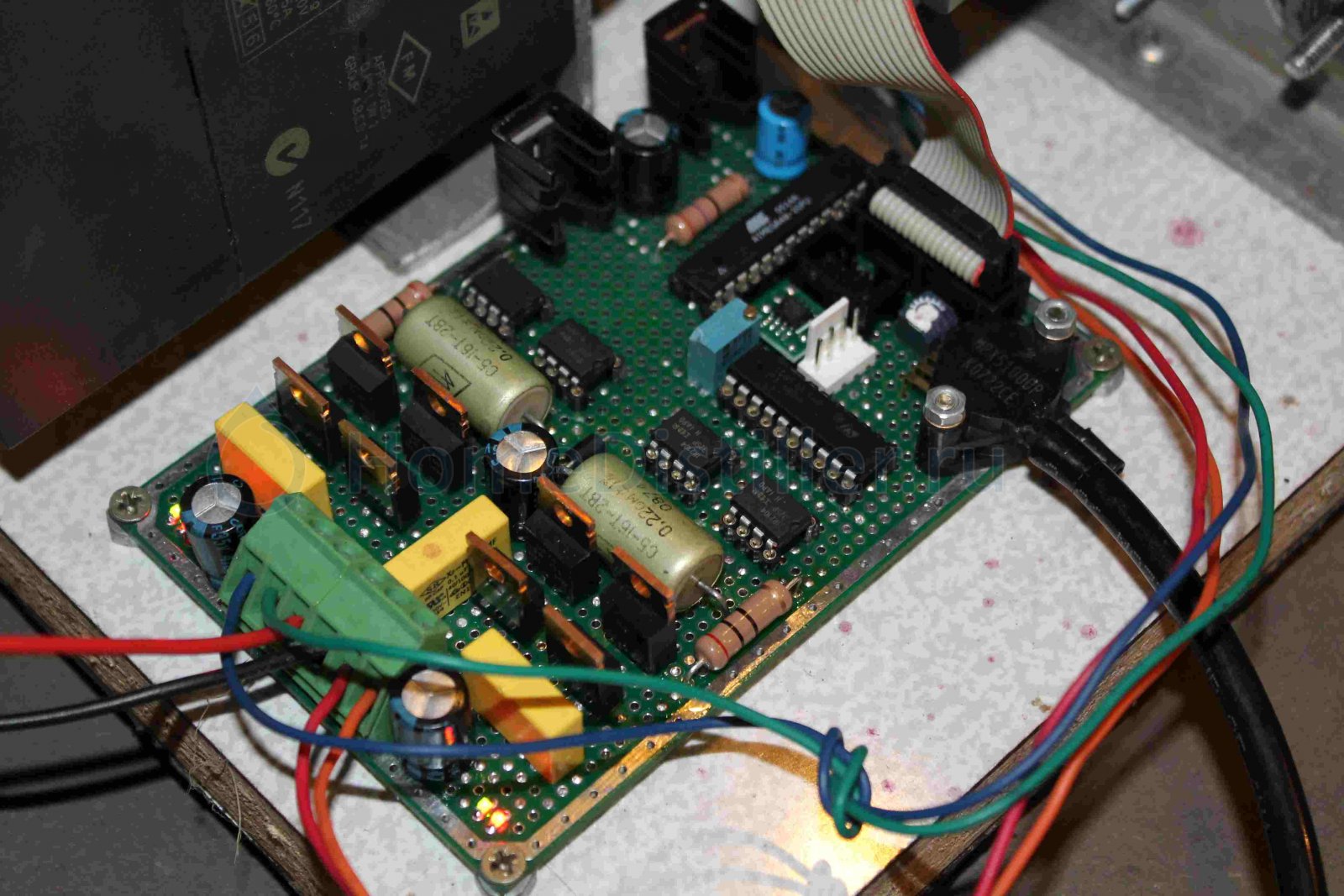
электроника(рассыпуха)- ~1000
токарные работы - 1000
консруктив


здесь ничего особенного
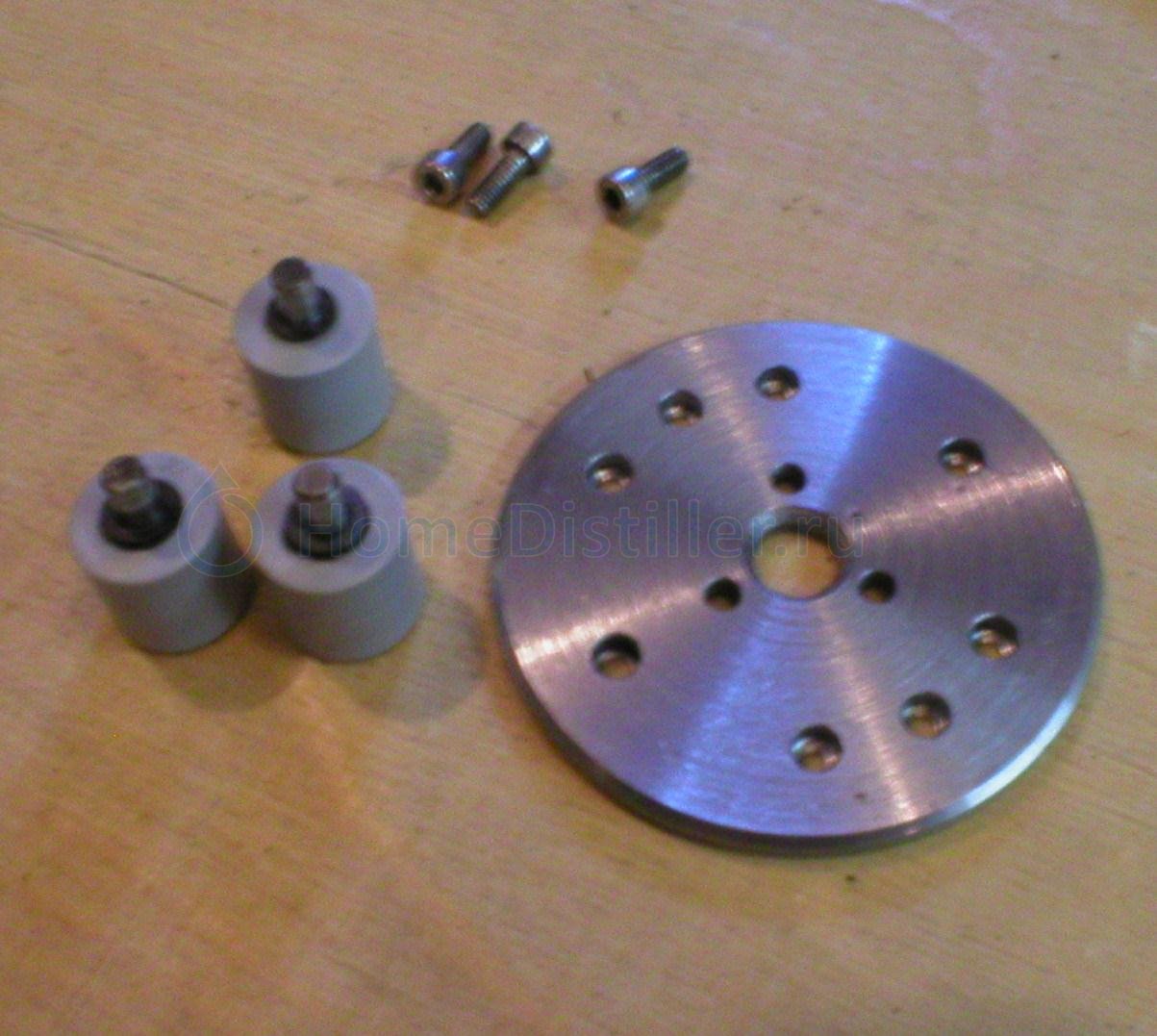
ролики пристроены от мебельной фурнитуры

подкова сделана из эбонита внутренний диаметр - 74мм, не нравится мне жестянка - гремит

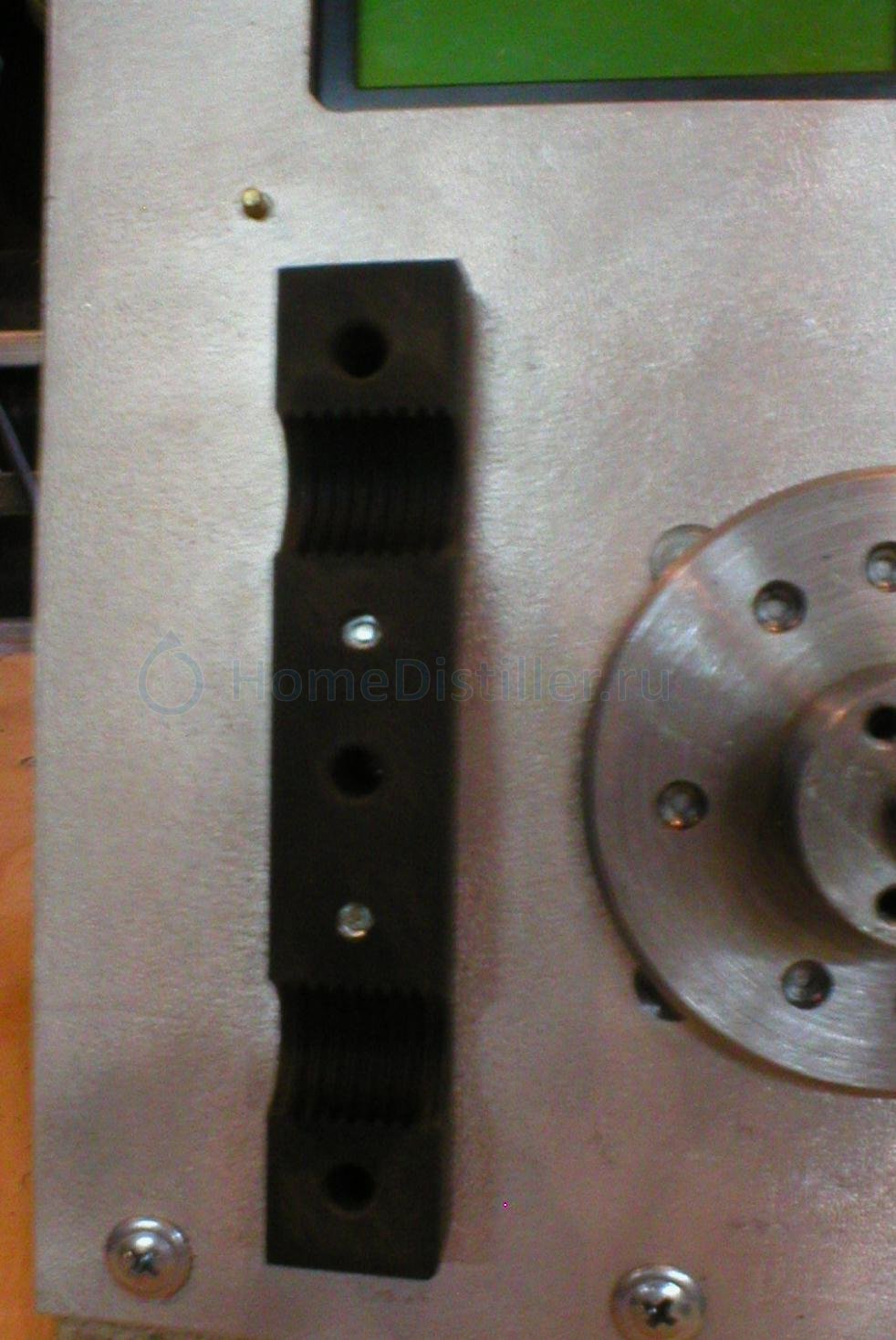
трубка силиконовая 8х2 , ложемент-зажим под неё сделан из эбонита. в отверстиях под шланг нарезана резьба М16 дабы хорошо держалась.
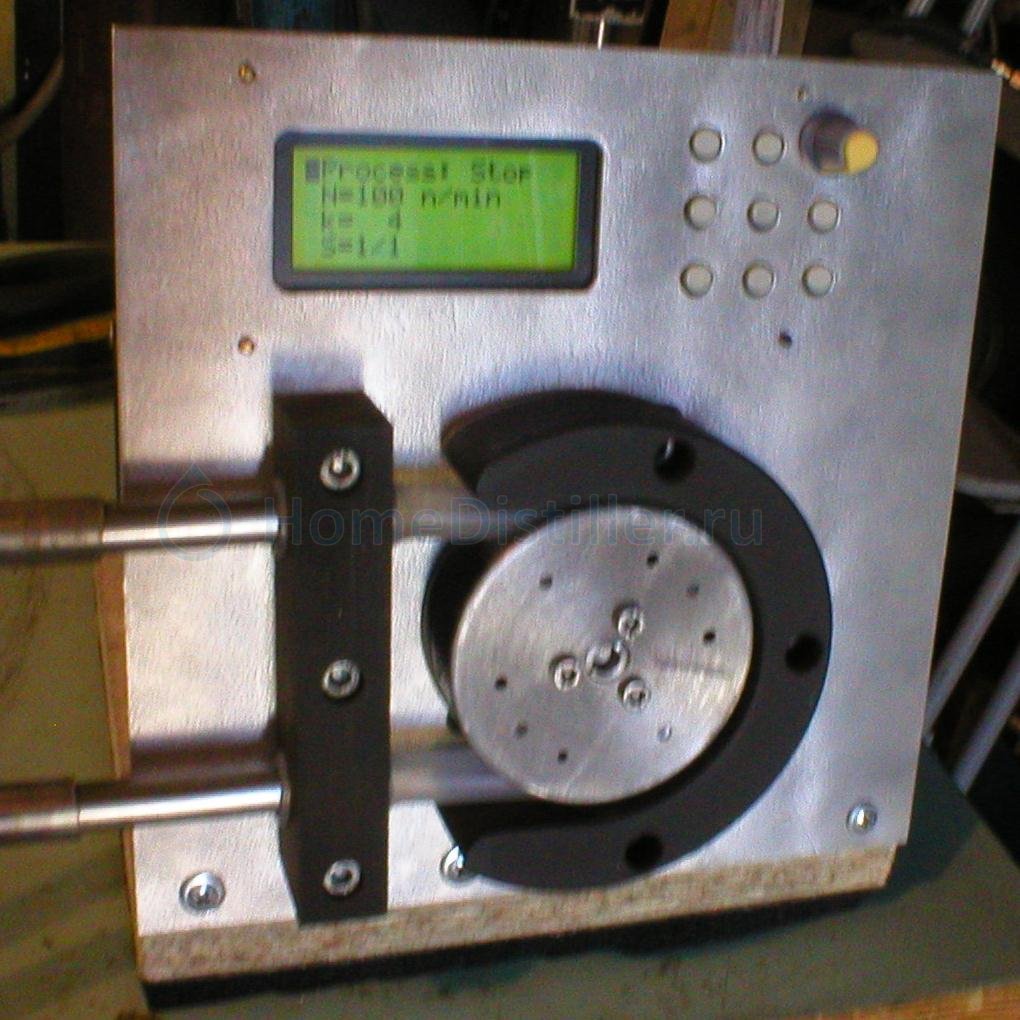
вот так это в сборе
непрерывно гонял пару часов . шаговик разогрелся ~ до 45-50гр (не ожидал , считал что горячее будет. работает мягко и тихо. в ролике ощущения другие т.к. микрофон в 20см от девайса. сделаю другой драйвер на мосфетах имхо помягче будет работать гавно эти L6203.
грабли - для трубки 8х2 маловат наружный диаметр петли в 74мм, как минимум 90 нужно делать
собсно видео с алгоритмом обучения, извиняюсь за качество , телефон блин.
сегодня осенило сделать датчик порыва трубки, как сделаю поставлю попмпу на круглосуточный прогон. заодно будет известен ресурс силикона в литрах, декалитрах ...
замечания, предложения ,приветствуются.