..."П" канал ПИД-регулятора как раз и борется с этим непоподанием в уставку...Kotische, 28 Февр. 09, 22:52Разве? как я понял, П-канал как раз управляется ошибкой, и она неизбежна. Причем при малом воздействии (схема с пилой) будет приближение к настраиваемой величине, а при большом воздействии (моя схема) будут постоянные перелёты.
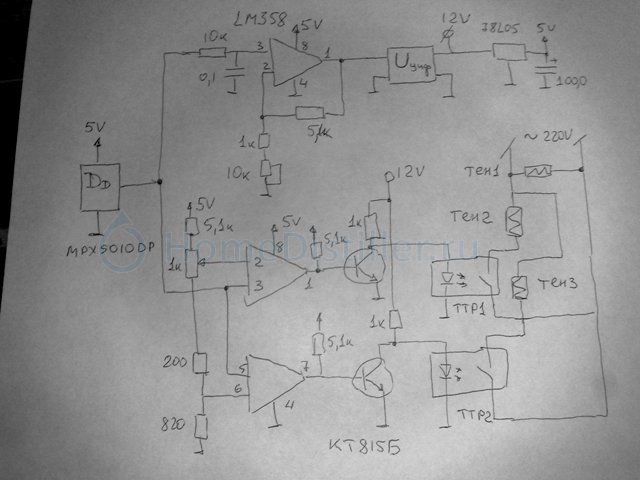
Но для надёжной стабилизации давления в кубе благодаря невысоким требованиям к точности и большой инерционности куба, вполне достаточно пропорционального принципа.
Считаю, что алгоритм стабилизации давления решен.
Теперь мне интересно другое приложение - к регулировке отбора. Вот там - другое дело. Если в кубе отклик почти мгновенный, то в колонне отклик поздний, и еще предстоит поработать, чтобы с ним разобраться.
Как раз экспериментирую